Mark Spencer, WA8SME, Education & Technology Program Director
A classroom simulation for hands-on learning of radio and robotic concepts.
NASA has been doing some exciting explorations of Mars with robots, currently Opportunity and Curiosity, which are maneuvered on the Martian surface by remote control. These robots collect and analyze soil samples and relay the results of these distant experiments back to Earth. While students can learn about these experiments in newspapers, scientific journals, on the Internet or TV, wouldn’t a more active approach provide a more engaging learning experience? Why not let students experience the same thrills as the NASA scientists and engineers through a simulation that they conduct in their own classrooms?
The Mars Lander Amateur Radio Robotics Exploration Activity described here is such a simulation that is affordable and appropriate for students and classrooms, and it is a robotic activity that uses ham radio. It is a powerful learning activity because it involves the same basic knowledge and skills that the professionals need to pilot Curiosity on Mars! It is hands-on learning that integrates Science, Technology Engineering and Mathematics (STEM).
The basic concept of MAREA described in this article uses robotic movement commands that are attached in the text portion of an Automatic Position Reporting System (APRS) packet transmission. The APRS packet with the attached commands is sent from a “mission control” school via the terrestrial APRS network or, when possible, even via the Amateur Radio station on the passing International Space Station (ISS), to a “ground station” school. At the ground station school the command packet is received and the command data is linked by UHF radio to the “Mars” robot for execution.
It sounds complicated, but if taken one step at a time, building on the basic concepts to the more rigorous ones, the students develop the skills and hardware (station equipment) that mirrors what NASA uses to control the Mars robots.
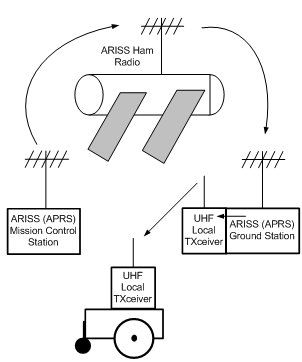
Figure 1 depicts the components of MAREA in action. ARISS refers to the Amateur Radio on the International Space Station program that is offered through the partnership of NASA, ARRL, AMSAT and other international space agency and Amateur Radio satellite associations. The mission control and the ground stations are APRS capable ham radio packet stations.
The APRS ground station has a UHF transceiver that acts as a local data link. It uses a low power Part 15 transmitter that doesn’t require a license. As the packet software on the ground station computer decodes the commands, the UHF transmitter sends them to the robot. Meanwhile, the robot is monitoring its attached UHF transceiver for commands. When the robot’s call sign is detected (in this case MAREA), it downloads the movement commands, executes those commands and then goes back to listening for the next set of commands. Students must program their robot to respond appropriately to the received commands.
The MAREA system components consist of:
• the typical 2 meter packet capable ham radio transceiver (or receiver if reception only is desired)
• a computer running a free APRS packet display program, sound card TNC (Terminal Node Controller) and serial loopback software packages
• UHF data link transceivers
• an instructional robot.
APRS Packet Station Equipment
The ham radio transceiver and antenna system can be as simple or exotic as desired. A very capable packet station for terrestrial APRS could be assembled using only handheld transceivers. If the school would like to use the packet system onboard the ISS, a 25 W or higher power FM transceiver, combined with a gain antenna on a computer controlled satellite tracking rotator system would improve packet throughput and the probability of success. I have had good success communicating through the ISS using a 5 W handheld transceiver with a handheld Yagi antenna at one end and a 2 meter 25 W transceiver with a fixed turnstile antenna at the other. For a “bare-bones” setup that will only receive local APRS signals, a simple vertical antenna and police scanner tuned to 144.390 MHz will do the trick.
APRS Packet Software
There are three programs needed at each station for the MAREA system to work, these are TNC, APRS and serial loopback software. There are some exceptional free and shareware software packages available on the Internet that allow you to receive, decode and display APRS packets, but also to compose the commands that are appended to packet transmissions.
I favor AGWPE for the sound card TNC (look for AGWPE.zip). Simply feed the audio output of the receiver into the computer sound card microphone input and the AGWPE will replace the traditional hardware TNC. If transmission is desired, connect the sound card speaker output to the transmitter’s microphone input. There are numerous tutorials on the Web that will guide you through the process and also offer simple interfacing circuitry to facilitate the connections.
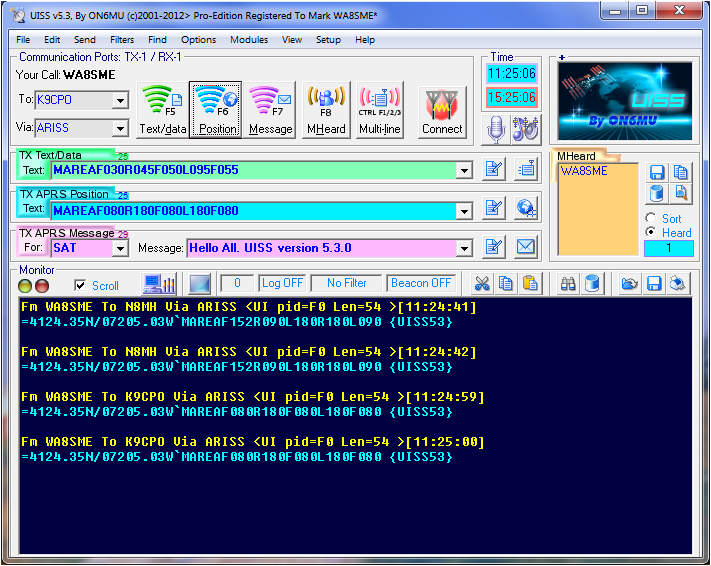
For casual APRS display and packet operations I favor UISS (see Figure 2). This is solid performing APRS software, it is fairly intuitive to set up and operate, and you can make custom maps for your local area (though admittedly, it does take some effort to make the custom maps). The UISS software allows the user to create a library of commands strings that can be appended to transmissions when a packet is transmitted. As a learning exercise, students might develop a mission plan that is composed of a series of discrete steps, store those steps in the UISS message library and transmit the individual steps of their mission plan to the robot.
The final part of the software portfolio is the add-on application Serial Loopback Interface. Serial Loopback Interface is no longer supported, but it is still readily available and very powerful. This add-on takes the packets decoded by UISS and sends the text to the computer’s communications port.
UHF Local Data Link
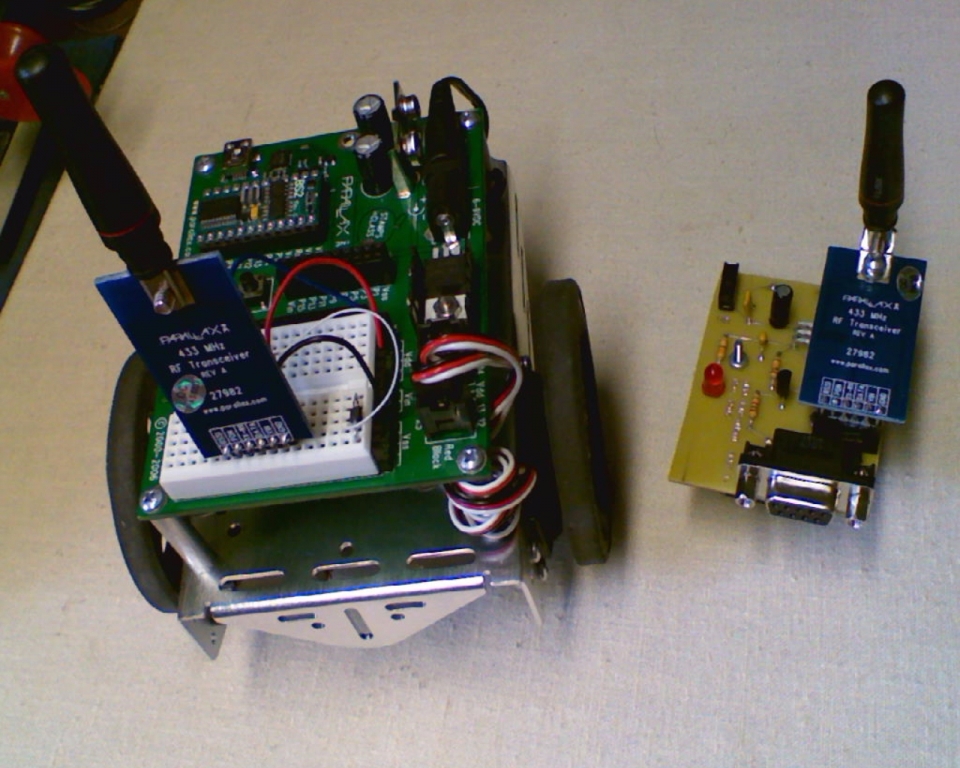
There have been a proliferation of Part 15 transmitters that can be used for the local data link between the UISS computer (the ground station) and the robot. For the prototype MAREA we used the UHF single channel transceiver produced by Parallax (part number 27982, Figure 3), which requires a USB to serial converter to connect the transceiver to the computer USB port.
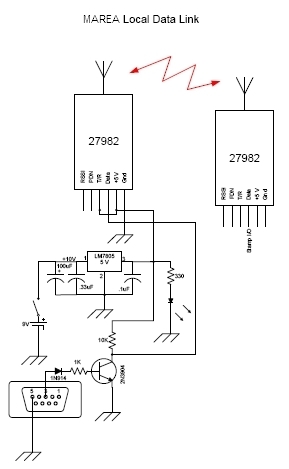
Figure 4 is a circuit diagram of an interface circuit used in the original MAREA prototype. The installation of the transceiver on the robot is straightforward with 5 V, ground and data lines.
One limiting factor of this transceiver is that it operates on a single channel. Alternatively, XBee modules (see Figure 5) provide multichannel capabilities, however these transceiver modules also require some interfacing boards to connect to the computer USB port and to provide voltage level changes to compensate for the 5 V/3.3 V differences between the XBee and the robot operating voltages. Parallax offers a pair of XBee modules and a companion pair of interfacing boards for about the same price as their UHF transceiver modules (Parallax part number 32440). The XBee modules have been adopted as the preferred data links for MAREA systems used during the ARRL Education & Technology Program Teachers Institute on Wireless Technology. The price of the local data links is around $100 total.
Robot Platform
There is nothing unique about the robot platform used for the MAREA project. The system used in the prototype MAREA system is the Parallax Boe-Bot (around $160 from the ARRL store). How the robot responds to commands is a function of its programming. The challenge for students is to develop the program that will translate each command into a specific action.
Implementing MAREA
The first step in implementing the MAREA concept is to install the APRS software of your choice and monitor local APRS activity to ensure you know how to operate the software. The next step is to program the robot.
The robot’s program consists of a number of subroutines that perform specific functions (see Figure 6). One routine would monitor an input/output pin connected to the data line of the UHF transceiver and “listen” for the identifier of the robot (MAREA or some other unique call sign). The robot’s microcontroller would wait for that call sign disregarding any other signals received on the frequency. Once it receives the correct ID, the subroutine would collect and store the commands that follow. To limit the size of the packet transmissions, I have found that a group of five movement commands is the best length.
The command format used in the prototype MAREA system was pretty straightforward, for example: F100R085F050L030B045E. This translates into forward 100 units, right 85 degrees, forward 50 units, left 30 degrees, backward 45 units, end of command. The length of the units would need to be defined for your students’ activity; it could be feet, inches, meters, centimeters, whatever is a practical unit for the robot’s task (see Figure 7).
The second set of subroutines would be specific to the surface area that the robot will travel on (each surface has its unique coefficient of friction), so your students would need to teach their robot how to execute a turn of a certain number of degrees left or right, or move forward or backward a certain number of linear units.
Flexible Implementation
The teacher can use the MAREA concept in a number of different ways:
1. By connecting an audio cable between the computer sound card microphone and earphone jacks, the commands transmitted on the computer terminal will be looped back and received by the packet program then sent via the UHF transceiver to the robot (Figure 8). This provides the opportunity for students to rehearse the maneuvers in their mission plan without transmitting the packets over the APRS system.
2. Have a second APRS station at the school (I use an APRS capable handheld radio) and use this radio to compose and transmit commands directly between the two APRS stations (Figure 9). This is a good way to test the RF connection to the APRS ground station.
3. Have a local ham transmit the commands from their home station to command the robot.
4. Coordinate with another school participating in the MAREA concept and have students at these connected schools command each other’s robots via the APRS system (Figure 10).
5. Set up an ISS capable satellite ground station and send your commands to the robot via the passing ISS.
6. Finally, have a distant school send commands to the robot via the ISS!
Beyond Strict Academics
Many schools use competitions as a motivating springboard to promote academic studies (Academic Olympics, FIRST Robotics are a few examples). Intra-classroom and inter-school MAREA competition is also possible. Set up an obstacle course or maze with a target area. Task a team of students to develop a MAREA mission plan to navigate the maze to the target. Points can be awarded for how close the “team” was to the end target and how efficiently they navigated the maze (did they stay within the lines?). A team could receive extra points for the method used to transmit the commands: local, terrestrial packet or the grand prize, by the ISS. The competing teams could be within the classroom, between classes in the same school, between schools or even across state lines. It is all up the imagination of the teacher and students.
Another Frontier, Ocean Exploration
The MAREA concept could also be adapted to the marine environment (Marine Amateur Radio Robotics Exploration Activity) by replacing a land-based robot with an unmanned underwater vehicle (UUV) robot such as the SeaPerch (see Figure 11 and 12). We have prototyped the use of the SeaPerch under the MAREA concept and the initial results are promising.
Want To Try MAREA?
The MAREA concept is being included in the portfolio of activities being supported by the ARRL Education & Technology Program. MAREA will be introduced in this year’s Teachers Institutes (TI), but we are looking to expand the availability of the program beyond the TI experiences through webinar venues. If you think that MAREA would be a positive addition to your school’s curriculum, we would like to hear from you. Participating schools will need to have (at a minimum) a computer that can be used as the MAREA ground station and a robot platform (preferably the Parallax Boe-Bot®). The local datalink equipment can be obtained for use in the webinar training through the ARRL ETP Progress Grant Program. Ultimately the school should move toward acquiring a basic 2 meter ham radio with interfaces to connect the radio to the computer sound card so that live APRS transmissions can be used to control the robot.
There will be a time commitment to participate in the webinars. It is anticipated that up to five 1-1/2 hour webinar classes will be conducted to guide teachers through the set up and operation of their MAREA system. To accommodate cross time-zone school participation, webinars may be conducted on Saturdays (but the schedule will be ultimately determined by the program participants). So if you would like to become involved with MAREA, we would like to hear from you. Contact Debra Johnson, ARRL Education Services Manager, at djohnson@arrl.org or at 860-594-0296.
If you have specific or detailed questions about MAREA, contact Mark Spencer, WA8SME, at mspencer@arrl.org or 860-381-5335. By the way, Matt Severin, N8MS, in southeast Michigan, and I (in southeast Connecticut) have performed a MAREA activity via the ISS and it is the coolest thing I have seen in a long time!